ESTE BLOG COMENZÓ A PUBLICARSE EN 2008, POR LO TANTO MUCHOS DE LOS TEMAS HAN QUEDADO DESACTUALIZADOS U OBSOLETOS. LOS LECTORES QUE DESEEN UTILIZAR ALGUNO DE LOS ELEMENTOS AQUI DESCRITOS DEBERÏAN ASEGURARSE DE BUSCAR LAS REFERENCIAS MAS MODERNAS DE LOS TEMAS DE SU INTERÉS. EL BUSCADOR INCLUIDO SERÄ UNA AYUDA PARA ESA BÚSQUEDA
Seguramente algún lector pensará que este artículo lleva un título muy anodino, porque titularlo "Controladores PWM" después de que llevo años hablando en este blog de controladores PWM parece que no es más que más de lo mismo.
PWM71
Bueno, si y no: He puesto este título porque el vídeo que aparece en la cabecera, es EL VIDEO de mis controladores PWM, es decir he hecho una compilación de sus características, propiedades y utilización, de modo que incluso alguien que aterrice de nuevas en este tema, si tiene la paciencia de verlo completo puede sacar una muy buena información de lo que aquí llevo años tratando.
Naturalmente este era el momento. En los últimos artículos he anunciado que había dado por terminado el desarrollo de esta línea de controladores, incluyendo algún complemento como el temporizador que aparece también en el vídeo. De momento no tengo intención de abordar ningún nuevo desarrollo, así que este vídeo es como el colofón de esa etapa.
Me he esforzado por hacer algo que hasta ahora no había hecho, y que es incluir en el vídeo demostraciones de estos controladores funcionando. Hasta ahora se han visto vídeos en los que como mucho vemos rodar algún tren, y eso siempre está bien para confirmar el excelente control de la velocidad lenta, y aquí hay también algún ejemplo de eso, pero es que con estos controladores se pueden conseguir más cosas,
PWM72
Creo que algún lector se habrá preguntado, cuál es el motivo, por ejemplo de que el PWM72 tenga un sistema de cambio de sentido y paro/marcha accionado por botones, cuando el PWM71 lo hace con un conmutador y eso es más sencillo y más barato. El motivo de esto es que el sistema accionado por botones es un sistema electrónico, y aunque efectivamente en el propio controlador hay unos botones para accionarlo, también se puede manejar desde fuera, por ejemplo con sensores situados en la vía. Cuando he escrito algo así no se si queda claro cuál puede ser la utilidad de ésto, y por eso en este vídeo se demuestra que gracias a esto se pueden hacer con mucha facilidad automatismos, que incluyen por ejemplo los trenes lanzadera, las vías reversibles o los bucles de retorno.
Por mucho que lo explique, con palabras, está claro que ver una locomotora recorriendo por ejemplo un bucle de retorno resuelto con montaje elemental basado en el PWM72 lo deja mucho más claro y no deja dudas sobre su funcionamiento.
Ese es el motivo de que exista un PWM72 con control electrónico de la marcha adelante/atrás y marcha/paro, y no meramente un capricho técnico de poder controlar esas funciones mediante botones y leds.
PWM73
Análogamente el PWM73 se justifica porque además de controlar el sentido de marcha y la parada, en éste también tenemos la posibilidad de controlar desde fuera la velocidad, y de eso también vemos ejemplos en el vídeo, desde la posibilidad de hacer un mando adicional con conmutadores o con un joystick hasta la posibilidad de conectarlo a un ordenador
Realmente un PWM73 permite controlar todas sus funciones externamente de manera que al final puede funcionar como interfase, convirtiendo señales muy sencillas (on / off ) en aceleraciones, frenadas, cambios de sentido, etc de las locomotoras. La aplicación inmediata de esto, que también vemos en el vídeo, permite pensar en un sistema muy sencillo de controlar trenes analógicos mediante un ordenador o un microcontrolador.
Soy consciente de que no es un vídeo "bonito". La mayoría del tiempo no vemos más que un óvalo muy elemental montado sobre un fondo gris, y si acaso alguna mano que entra en cuadro para accionar algún botón o mover algún control. Ya habrá tiempo de hacer algún vídeo en veamos alguno de estos controladores manejando trenes en una maqueta, con su decoración y todo lo demás. De hecho incluso los trenes que se ven, la mayoría de las veces los vemos desde arriba, con lo que no quedan precisamente favorecidos. Esto es intencionado, ya que no quería que ningún elemento ajeno a lo que se quiere demostrar, distraiga al espectador. Otra cosa es que cuando hay algún montaje eléctrico los cables se muestran tendidos "chapuceramente". Con esto se pretende hacer ver que simplemente se trata de unir con cables los distintos elementos sin ninguna precaución especial, y de paso que quede patente que no hay ningún elemento oculto que pudiera estar interviniendo en la demostración.
Por cierto que éste vídeo ha supuesto más de cincuenta horas de grabación y por lo tanto de funcionamiento de los controladores con continuos cambios de marcha, aceleraciones y frenadas, manejo de controles, sensores Hall y Reed, pulsadores, conmutadores, temporizadores, placas de comunicaciones etc etc. Todo esto se traduce en que los controladores han sido sometidos a exhaustivas pruebas en condiciones reales, y la verdad es que no ha habido ningún problema.
Bueno, pues recomiendo hacerse con una buena cerveza, y sentarse a disfrutar del vídeo.
Las últimas versiones de estos controladores están a la venta en la tienda on-line:
Hoy voy a referirme a un artículo publicado en un foro americano dedicado a la afición de los trenes en miniatura El foro se llama "model-railroad-hobbyist" y el artículo lleva el nombre de "Y.D.I.Y?" que es de donde he tomado el título de este articulo. Como la sigla "DIY" se usa frecuentemente en inglés para referirse a los elementos fabricados artesanalmente, supongo que ese titulo debe corresponder a "You Do It Yoursef ? " o sea algo así como "lo haces tu mismo?"
El artículo está en inglés y puede encontrarse en versión original en este enlace http://model-railroad-hobbyist.com/node/28501 aunque al tratarse de un blog es posible que con el tiempo se vaya resituando. El nick del autor es Pelsea
Voy a poner a continuación una traducción al español, hecha por mi, así que espero no cometer demasiados errores: Recientemente vi un post en uno de los otros hilos sobre Arduino que planteaba la pregunta "¿Por qué dedicar tiempo a aprender Arduino y electrónica cuando hay un montón de productos comerciales, tanto en kit como listos para funcionar que hacen más o menos las mismas cosas? He reflexionado sobre esto anteriormente, y estoy de acuerdo con casi todas las razones que otros mencionan sobre el coste, sobre el desafío intelectual que supone, y sobre las ventajas de mantener el cerebro activo. Pero se me ocurrió que la razón principal para mí es la elegancia. La elegancia en la electrónica es difícil de definir. (Es una de esas cosas que los ingenieros conocen pero de la que rara vez hablan). Es un circuito que usa tan pocos componentes como sea posible, pero no menos. Es resolver un problema por 75 ¢ que cualquiera podría solucionar gastando $ 10.00. Es un software que funciona. Cuando construyo mi propio circuito, estoy asumiendo la responsabilidad de todo eso. Y lo que es más, estoy construyendo algo para una necesidad propia bien determinada, y sin los condicionantes de respetar un precio o una fecha de envío (los flagelos de las compañías de tecnología). Pienso en él con super-detalle. Realizo versiones múltiples del circuito en una protoboard, recorro la web para encontrar otros efoques del problema, incluso leo las hojas de datos de todos los componentes. Cuando lo construyo, estoy constantemente tratando de encontrar el diseño más claro de los componentes, el menor número de cruces de pistas, ¡diablos!, incluso me esfuerzo por ver que los colores de las resistencias son legibles de izquierda a derecha o de arriba a abajo. Cuando escribo código, sigo el consejo que siempre le di a mis estudiantes sobre incluir comentarios y nombres significativos a las variables, uso paréntesis opcionales para clarificar sentencias complejas, y evitar expresiones del tipo x = ++ x> 11? X - 12: x. También pruebo mi código con entradas ilegales, lo ejecuto mucho tiempo, y busco a gente que no sabe nada sobre él para que lo prueben por mí. Cada vez que hago un cambio, vuelvo a ejecutar todos los casos de prueba. Aspiro a ser el mismo tipo de artista que alguien que utiliza acrílicos y óleos, así como pigmentos para el envejecer un vagón, que considera que las palancas de los enganches son un detalle básico, que pasará tres días trabajando en la timonería de debajo de la carrocería. Tengo una caja de placas de circuitos que nunca verán la luz del día porque no llegaron a dar su primer aliento, cada uno representando una semana de trabajo. El circuito para servo anterior (se refiere a otro hilo del blog) es la versión 6 - los primeros 5 eran analógicos. Uno era lo suficientemente bueno para publicarlo en el citado hilo, los otros estaban bien, pero les faltaba algo. Vagones que son decapados para ser repintados como las protoboards que son desmontadas para empezar de nuevo. Así que no voy intentar repetir que la electrónica y la programación son fáciles - no lo son. Para usarlas se requiere el dominio de algunos conceptos teóricos difíciles y un montón de trabajo minucioso. Claro, que alguien dirá que se pueden copiar esquemas de libros de electónica (y esa es la mejor manera de empezar) y obtener resultados correctos, pero con el tiempo tendrá que lanzarse y diseñar algo que es exclusivamente suyo. Cuando se llega a ese punto, se encuentra una satisfacción nunca antes conocida
Cuando leí ese artículo, tuve la curiosa sensación de que podía haberlo escrito yo mismo. Aparte de un enfoque un poco distinto, porque por lo que parece, este compañero se dedica sobre todo a realizar complementos para Arduino, y lo mío son más bien sistemas de lógica digital, la filosofía que subyace es exactamente la misma: Se trata de hacer por ti mimo algo que puede ya existir (o no) pero que tu quieres que tenga embebido tu propio punto de vista sobre el asunto.
Mucha gente me ha dicho, lo mismo que a este compañero, que es absurdo dedicarse a diseñar y construir un dispositivo que ya existe comercialmente. Sin embargo como él mismo dice la satisfacción de lograrlo por uno mismo es "nunca conocida". Si encima estás convencido de que tu producto es mejor que lo que se puede encontrar comercialmente, la satisfacción es doble.
Claro que conseguir eso no es fácil, en sus mismas palabras se necesita el dominio de algunos conceptos teóricos difíciles y un montón de trabajo minucioso y por lo tanto mucha dedicación y mucho tiempo. Hace poco anuncié aquí que estaban ya operativos los tres controladores de la serie PWM7x, pero el anuncio de lo que pesaba hacer se hizo aquí mismo hace más de un año (Nuevas Ideas)
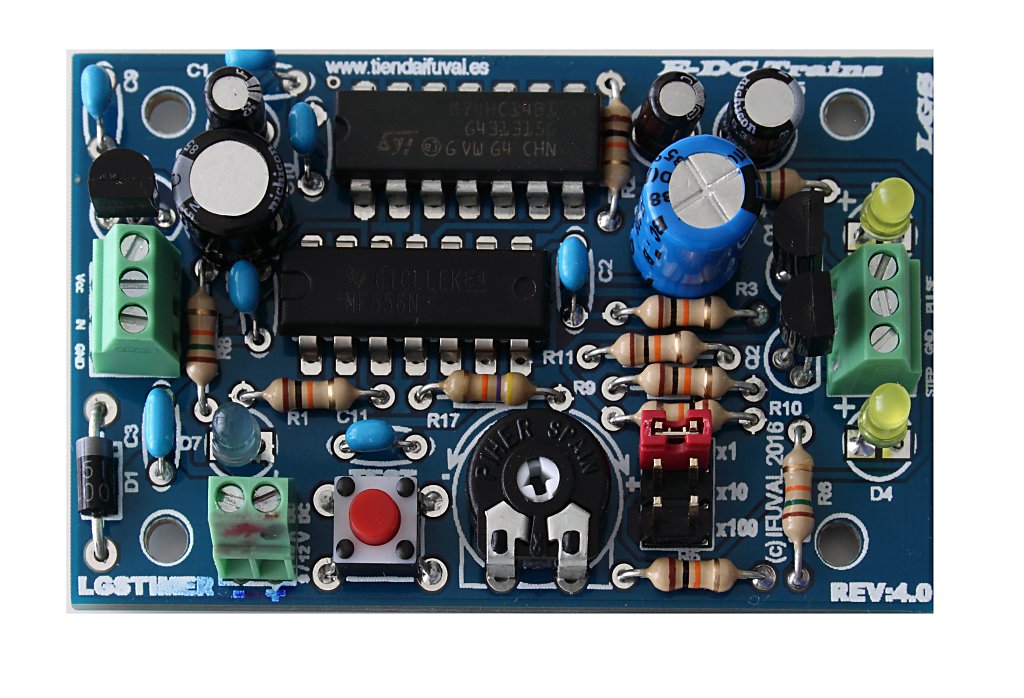
Otro ejemplo reciente lo tenemos en el temporizador LGSTIMER que aparece en la cabecera de este artículo. Es algo bastante sencillo, pero quería hacerlo compatible con toda la linea de controladores y drivers que llevo desarrollando, lo cual me ha hecho que tuviese que seguir un proceso como el descrito en el artículo, con búsqueda de documentación de componentes, pruebas en protoboard, tentativas de diseño...etc No en vano, la placa de circuito que vemos en la imagen lleva abajo a la derecha la indicación "Revisión: 4.0" Esto significa que ha habido tres versiones de esa placa anteriores que han acabado en ese cajón lleno de placas de circuito que "no han visto la luz" y que yo también tengo.
Y a pesar de lo que también dice el compañero, muchas veces el coste final de un elemento autoconstruído supera el elemento comercial correspondiente. Puede que si valoramos el producto final no sea así, pero si consideramos todo el material dedicado a pruebas y fallos seguramente ya será superior, y desde luego si valorásemos el tiempo dedicado, el coste sería astronómico.
Supongo que algún lector, pensará que si esto es así es de locos dedicarse a esta actividad. Yo siempre digo que los que opinan así, y son muchos, olvidan que esto es un hobby, y lo valoran como una actividad comercial. Estamos tan acostumbrados a valorar las cosas desde un punto de vista comercial, en el que lo importante es tener el producto deseado lo antes posible, al menor coste y con el mínimo trabajo, que pensamos que hay que aplicar esta norma a todas las actividades de nuestra vida. Afortunadamente no todo es así, y hay quien navega a vela, quien sube a la cima de una montaña, o quién pinta un cuadro de un paisaje en lugar de tomar una fotografía digital.
Como decía, esto es un hobby, y por lo tanto es un error valorarlo con criterios comerciales. En un hobby el objetivo no es el producto final. El objetivo es emplear un tiempo de ocio en una actividad creativa que redunde en una satisfacción personal. Por lo tanto, cuanto más tiempo se emplee, mejor, porque ese es precisamente el objetivo de hobby. Y naturalmente cuanta más satisfacción obtengamos mejor, y de acuerdo con el compañero, no hay mayor satisfacción que ver funcionar algo que es una creación personal, en la que has puesto a prueba toda tu experiencia, tus conocimientos, y un montón de trabajo.
Y para terminar: Hay muchos compañeros de afición que valoran extraordinariamente a esos expertos maquetistas capaces de hacer un diorama absolutamente indistinguible de la realidad, o realizar el envejecido de un vagón hasta que quede perfectamente sucio, o realizar trabajos con latón fotograbado, con Evergreen o con otras técnicas de maquetismo. Sin embargo, como reivindica nuestro compañero americano, el mismo "cariño" trabajo y dedicación requiere el desarrollo de un elemento electrónico, que a veces es recibido con la consabida frase: "pero eso lo puedes comprar hecho"
En mi último artículo, comentaba que el vídeo demostrativo del funcionamiento del temporizador era un poco soso, ya que aparte de que apenas se veían unos led encendiéndose y apagándose, seguramente resultaba un poco difícil verle alguna utilidad práctica. Asi que he grabado otro video donde ya podemos ver algo con un poco más de salero.
LGSTIMER
El vídeo, que va situado en la cabecera de este artículo, es una demostración de como puede usarse el temporizador, que por cierto lleva el nombre de LGSTIMER*, para conseguir, en combinación con el controlador PWM73, paradas y arrancadas progresivas de los trenes de forma totalmente automática por ejemplo ante una señal, o en una estación.
No se si algún seguidor de este blog se habrá percatado de que cuando hice el antiguo PWM05, le puse una función que producía una parada progresiva automática, aunque tenía la carencia de que no tenía una arrancada progresiva automática. Cuando empecé a hablar aquí de los controladores PWM7x hablé desde el principio de un PWM73 sin parada automática y de un PWM74 con "velocidad objetivo" que resolvía el tema de la parada y arrancada progresivas. Sin embargo, he desarrollado efectivamente el PWM73 pero el proyecto de un PWM74, ha quedado congelado. El motivo es que el tema de la "velocidad objetivo" es muy bonito en teoría pero muy complicado de llevar a la práctica y sobre todo difícil de entender para su manejo. Por otro lado se me han ocurrido dos procedimientos más sencillos de conseguir una parada y una arrancada progresivas automáticas, basándome en el PWM73.
Aunque no renuncio a la segunda forma, realmente la más sencilla es la que se basa precisamente en el LGSTIMER y que es la que vamos a ver en este artículo. Este temporizador, previsto inicialmente para otras cosas permite hacer un montaje para conseguir la parada o arrancada progresivas, y usando dos LGSTIMER conseguir ambas cosas.
Lo que vemos en el video, es un montaje de pruebas en el cual, arriba a la izquierda vemos el famoso "simulador de locomotoras" que suelo utilizar en las pruebas para ver el efecto que tendría el controlador actuando sobre una locomotora. A su derecha, vemos los dos circuitos LGSTIMER, de los cuales el que está más arriba va a controlar la aceleración, y el situado debajo controlará la frenada.
Abajo, en el centro está el controlador PWM73 que va a proporcionar la corriente al "simulador" y a su derecha, he situado sobre una placa protoboard dos sensores Reed.
La idea es que activando el sensor Reed situado más arriba, se active el LGSTIMER que controla la aceleración, y veamos como la supuesta locomotora arranca y acelera de forma progresiva hasta una velocidad determinada, y al alcanzarla se mantiene constante dicha velocidad.
Una cosa interesante es que al iniciar el video el controlador está en posición de "stop" (led rojo encendido) pero al activar el Reed, se lleva la señal simultáneamente a la función"F" del PWM73 con lo cual ese se pone en "marcha adelante" (led verde de la derecha) y también a la entrada del LGSTIMER, con lo que este inicia la cuenta del tiempo Esto confirma lo que decía en el anterior artículo de que las señales que activan el LGSTIMER deberían ser compatibles con las que activan los PWM7x (y los demás automatismos). Aqui se ve que la misma señal producida por el sensor Reed, activa en paralelo ambos dispositivos
Aquí se utiliza la salida "step" del temporizador Esta salida se activa al iniciarse la cuenta del temporizador y permanece activa durante todo el tiempo de la cuenta. Asi que simplemente llevando esa señal a la entrada "U" del PWM73 se hace el mismo efecto que se haría manteniendo pulsado el botón de Acelerar del PWM73 durante ese tiempo. Dependiendo del ajuste de tiempo en el LGSTIMER y del ajuste de inercia en el PWM73 se alcanzará una determinada velocidad, en el video se llega aproximadamente a un 77%.
Se podrá pensar que confiar en que se va a alcanzar siempre una determinada velocidad basándonos en el tiempo en que permanece activada la función de acelerar, es un poco arriesgado, porque parece que podría haber variaciones importantes de una a otra vez, aún con el mismo tiempo de aceleración.
En realidad no es así porque si ajustamos la inercia en un determinado punto lo que estamos realmente ajustando es la frecuencia de los pulsos que hacen subir o bajar la velocidad. Si no cambiamos el ajuste de inercia, esta frecuencia será la misma en cada aceleración, y por lo tanto en un tiempo determinado el número de pulsos será rigurosamente el mismo cada vez, de manera que la velocidad a que se llegue será siempre la misma.
Asi, una vez cumplido el tiempo del primer LGSTIMER, la salida del mismo se apaga, y por tanto deja de aumentar la velocidad, que se mantendrá indefinidamente.
A continuación vemos como acercamos de nuevo el imán, esta vez al segundo Reed que a su vez está conectado a la entrada del segundo temporizador, para producir la parada progresiva. Con ello este segundo LGSTIMER se activa. Lo correcto es que el ajuste de tiempo de este segundo temporizador sea igual o ligeramente superior al del primero.
Al igual que en el caso anterior, la salida "step" de este segundo LGSTIMER se une a la entrada "D" del PWM73 con lo cual se activa la función de frenado durante todo el tiempo que la salida "step" del temporizador esté activa, y por lo tanto, como la frecuencia es la misma, la velocidad decrecerá progresivamente hasta alcanzar el valor cero con lo que el tren ira decelerando hasta detenerse.
Además se ha unido la salida "pulse" de este segundo temporizador a la entrada de función "S" del PWM73. Con ello al terminar la deceleración, el controlador pasa a situación de "stop" con el led rojo encendido, tal como estaba inicialmente.
Tal como se ha visto, la activación de las funciones de parada y arrancada se ha hecho mediante sensores Reed. Por supuesto podíamos haberla hecho con pulsadores, o con cualquier otro tipo de sensores como los Hall o las vías de contacto.
Por ejemplo en un sistema de bloqueo automático podemos poner un sensor Hall o Reed una cierta distancia antes de una señal, y conseguir que cuando la señal esté roja, al pasar por el sensor el tren inicie una parada progresiva que le lleve a detenerse a la altura de la señal. Análogamente la señal que abre esa señal roja, se puede llevar en paralelo a un temporizador para que al recibirla el tren se ponga en movimiento de forma progresiva. Observese que no hay que cortar carriles ni nada parecido. los trenes se paran o arrancan por el controlador que los maneja.
Y.......!ya! Hasta aquí he llegado con el desarrollo de este sistema de control que tiene su origen hace más de dos años (véase el artículo Logico de Octubre de 2014) y que ha dado lugar a toda una serie de automatismos basados en el sistema de puertas lógicas.
Ahora, vamos a por los trenes
Editado 27/12/2016: Véase el artículo Controladores PWM donde aparecen varias formas de uso de este temporizador
--------------------------------
* El nombre LGSTIMER viene de la sigla LGS (Logic Gate System) que es lo que identifica el sistema de puertas lógicas con que se activa todos estos dispositivos, y de la palabra TIMER o temporizador
Como comentaba en el artículo anterior, me he dedicado a diseñar un temporizador que pueda ser usado junto con PWM72 y PWM73 para automatizar ciertas funciones que necesitan un retardo de tiempo, como por ejemplo la parada en una estación.
Realmente hacer un temporizador electrónico es muy simple, y para ello basta usar un circuito NE555 en un montaje como el de la figura adjunta. De hecho el circuito NE555 se llama precisamente "timer" aunque sus funciones son variadísimas. Por ejemplo en todos mis controladores PWM se utiliza este circuito para genera la señal cuadrada que una vez amplificada se lleva a las vías.
El que quiera construir uno de estos circuitos temporizadores no tiene más que hacer el esquema de la figura anterior. El funcionamiento es muy simple: Cuando se cierra el pulsador S1, y por lo tanto la tensión del terminal TR cae a cero, comienza a medirse un intervalo de tiempo, durante el cual la señal de salida en el terminal Q está alta, de manera que si tenemos conectado en esa salida, por ejemplo un relé, éste se activará durante dicho intervalo. Al cumplirse el tiempo la señal de salida cae a cero, y por lo tanto si había un relé conectado este se desactiva.
El tiempo que dura activo depende de dos factores: la resistencia de la rama que une el terminal TH y el positivo de la alimentación y la capacidad del condensador conectado entre el mismo terminal TH y tierra. En el esquema, la rama entre TH y el positivo lleva una resistencia variable de 1 M más una fija de 10 K. Por la parte de tierra se han puesto tres condensadores de capacidades 10 uF, 100 uF y 1000 uF, con unos puentes que permiten conectar uno u otro. Con este esquema, y con tensión de 5 voltios el tiempo se puede ajustar entre 0,1 y 12 segundos moviendo la resistencia variable de extremo a extremo y con el condensador de 10 uF conectado. Si cambiamos al condensador de 100 uF el tiempo se puede ajustar entre 1 y 120 Segundos y con el tercer condensador entre 10 y 1200 segundos, que son veinte minutos. Son intervalos de tiempo muy útiles para los automatismos habituales en las maquetas.
Quede claro que no se trata de un cronómetro de precisión, ya que su funcionamiento se basa en la descarga de un condensador, de manera que puede variar por las variaciones de características de los componentes electrónicos.
Sin embargo yo quería algo más complicado: Por un lado aunque en algún caso se pueda querer activar el sistema mediante un pulsador, como el S1 del esquema, mi idea es mantener este dispositivo dentro de la misma línea del resto de automatismos, es decir que pueda ser accionado por detectores reed, hall, etc. No me ha parecido necesario hacer un sistema de puertas lógicas, pero si que la sensibilidad sea suficiente para cualquier detector. Realmente NE555 es un elemento analógico asi que he querido pasar las señales de entrada y salida por un circuito "trigger" para que el funcionamiento sea más estable.
Por la parte de la salida he añadido un segundo NE555 que se activa precisamente cuando el primero termina la cuenta de tiempo. Este segundo temporizador se mantiene activo un tiempo muy corto y además fijo (aproximadamente 100 ms), es decir, produce una salida que es exactamente como la que produce por ejemplo un detector Hall cuando pasa sobre él una locomotora. Esta clase de impulso es precisamente la que activa cualquier de las entradas de los automatismos tales como el BLKS03, o el DDESVIO3, y también las "funciones externas" de los controladores PWM72 y PWM73. Realmente es también el tipo de señal que activa el propio temporizador, de manera que el efecto que se obtiene es que cuando el temporizador recibe una señal, al cabo del tiempo establecido emite una señal análoga a la que recibió, de modo que actúa como una linea de retardo para la señal.
Para verlo gráficamente he grabado un pequeño video. Hay que explicar que lo que vemos en la imagen son tres cosas: En la parte de abajo hay un BLKS03 que tiene conectada a su izquierda, en lo que serían las salidas, una placa con unos leds que se encienden y apagan para poder ver la activación y desactivación del BLKS03.
En la parte de arriba tenemos el temporizador que tiene conectado en la entrada, a la izquierda, un sensor Hall. Por la derecha, en la salida, un cable amarillo va a una de las entradas del BLKS03. El resto de cables, rojos y negros son alimentación de 12 V, tanto para la placa de leds, como para el BLKS03 como para el temporizador.
Lo que vemos es lo siguiente: Inicialmente están encendidos dos leds de la placa de leds (los más externos) entonces, acercamos un imán al sensor Hall y vemos como cuando el Hall se activa, en el temporizador se enciende un led amarillo. Al BLKS03 no le llega señal alguna. Al cabo del tiempo programado, que en este caso es de unos seis segundos, termina la temporización, se apaga el led amarillo y se enciende momentáneamente el segundo led amarillo. Este segundo led indica que se ha emitido la señal de salida. La señal sale por el cable amarillo, llega al BLKS03 y este conmuta, con lo que vemos como cambian los leds encendidos de la placa de leds.
Después de restaurar manualmente tocando con un cable (verde) la otra puerta del BLKS03 repetimos el procedimiento.
Esto que resulta un poco soso, vamos a ver pronto que permite realizar con toda facilidad una variedad de automatismos muy interesante.
Seguiremos informando.
Editado 27/12/2016: Véase el artículo Controladores PWM donde aparecen varias formas de uso de este temporizador