(Viene del artículo anterior)
Decíamos que la potencia transportada por la corriente eléctrica es proporcional, a igualdad del resto de factores, al valor eficaz de su tensión, y como consecuencia de ello, la velocidad que alcanza un tren alimentado por cualquier tipo de corriente continua (continua en el sentido de ser siempre del mismo signo), es proporcional a esta tensión eficaz, sea cual sea la forma de onda de la corriente. y por ello no parece que tenga justificación el escoger determinada forma de onda, salvo por la consideración de que sea la más barata de generar.
Pero siendo esto cierto, es aplicable para una locomotora que está moviéndose, es decir que está recibiendo potencia por la corriente eléctrica y la está convirtiendo en movimiento. Pero ¿que ocurre cuando la locomotora está parada y empieza a recibir una tensión cuyo valor eficaz empieza a aumentar desde cero, tal como veíamos en el vídeo del capítulo anterior?. Cuando empieza a circular la corriente por el bobinado del motor aparecen dos fuerzas que tienden a hacer que el rotor del motor gire. En física estas dos fuerzas iguales y de sentido contrario que tiende a hacer que un objeto gire se denomina "par de fuerzas" y en el caso de los motores se suele denominar "par motor" o simplemente "par". En la imagen de la derecha, que es el el esquema de un motor eléctrico, estas dos fuerzas son las indicadas con F

Si el motor está girando, esta fluctuación hace que el rotor reciba un par motor fluctuante, pero gracias a la inercia del rotor la velocidad de giro se establece en un valor medio que corresponde a lo que sería un par motor medio, producido por una corriente plana de tensión igual a la tensión eficaz. Cuando el motor está girando la potencia que desarrolla es igual al producto del par por la velocidad de rotación, de modo que por eso hemos hablado hasta ahora de potencia y de velocidad.
La diferencia, sutil, es que el par motor aparece en el momento en que aparece una mínima corriente aunque el motor todavía no se mueva. Si no se mueve la velocidad es cero y no se produce ninguna potencia mecánica, de modo que la pequeña potencia que recibe el motor de la corriente eléctrica se transforma totalmente en calor. Pero por mínima que sea la corriente, aparece ya un par.
Y si ya hay un par, aunque sea mínimo, ¿porqué no se mueve el motor? Pues porque para que el motor, empiece a moverse tiene que vencer unas resistencias que se oponen al movimiento. Las más importantes son las de rozamiento. Es decir para que el motor gire tiene que haber un par motor que supere el "par resistente" derivado del rozamiento del eje en los cojinetes, y si hablamos de la locomotora completa, también el rozamiento de la cadena de engranajes, los cojinetes de las ruedas etc. En mecánica se dice que el rozamiento estático es mayor que el dinámico, esto es, que para que el movimiento comience, hay que vencer un rozamiento que disminuye en cuanto empieza el movimiento. Digamos entonces que si se necesita un determinado par motor para arrancar, una vez que ha comenzado el giro, ese par es más que suficiente para mantener la marcha. Esto es muy importante, para nuestro caso porque si en un momento dado el par alcanza el valor suficiente para vencer ese rozamiento estático, aunque sea por un tiempo de milisegundos, el motor ya arranca, y a partir de ahí empieza a moverse a una velocidad que corresponde a la potencia proporcionada por la corriente. Para que no se diga que no tenemos todo en cuenta digamos que otra acción que se opone inicialmente al arranque del motor es la inercia, principalmente la del rotor del motor en su giro, pero esta fuerza que como sabemos se opone siempre al cambio de movimiento, al arrancar se opone a que el motor empiece a girar, pero si se ha superado, y el motor ya está girando se opone a que deje de girar, así que favorece el que se mantenga el movimiento una vez que éste ha empezado. Como ya hemos dicho, la inercia del rotor tiene un papel muy importante en la estabilidad del movimiento.
Editado en 28/01/2018 El parrafo anterior tiene una importante inexactitud: Es cierto que el motor no comienza a girar hasta que el par motor supera las fuerzas que impiden el movimiento, pero no es correcto que la principal fuerza que se opone al movimiento sea el rozamiento. En los motores de corriente continua con imán permanente y piezas polares de hierro se produce un fenómeno llamado cogging que se deriva de la atracción entre polos del imán y las cabezas de los núcleos de las bobinas, y que se manifiesta por una par que a lo largo de cada vuelta, en unos puntos es favorable al movimiento y en otros opuesto. Este par de coggin se produce permanentemente en el motor incluso cuando está desconectado, y lo podemos notar haciendo girar con los dedos el eje de un motor aunque esté totalmente desconectado. Naturalmente cuando el motor se queda sin alimentación y se para, si ésto ocurre en una posición en que el par es favorable sigue girando gracias a este par favorable hasta llagar a una posición en que el par es desfavorable y entonces se queda parado en esa posición. O sea que al ir a arrancar siempre tiene que empezar por vencer el par de cogging en la posición más desfavorable y por eso el motor no arranca hasta que el par motor alcanza un valor mayor que el valor máximo del par de coggin. Una vez vencido ese primer par de coggin en contra, éste va variando a favor y en contra con lo que se necesita menos par motor para mantener la velocidad de giro
Todo esto nos lleva a una conclusión: Para que la locomotora arranque se necesita que al menos en un instante el par motor supere un valor mínimo que depende fundamentalmente del par de cogging y por tanto de la construcción del motor. Como el par en cada momento es proporcional a la tensión necesitamos que la tensión supere en algún momento un determinado valor. Una vez que el motor ya ha comenzado a girar, se moverá a una velocidad que es proporcional al valor eficaz de la tensión. Dicho de otra forma: La locomotora arrancará cuando la tensión de pico de la corriente supere un determinado valor y continuará moviéndose a la velocidad correspondiente al valor eficaz de la corriente. Por lo tanto no es indiferente la forma de onda de la corriente, porque aunque la velocidad solo dependa de la tensión eficaz, el punto de arranque si que depende de la tensión de pico.
Veamos la importancia de esto: Supongamos que alimentamos una locomotota de 12 Voltios con una corriente continua plana cuya tensión empieza a subir, desde 0 hasta 12 voltios. Supongamos que el motor vence los rozamientos cuando la tensión alcanza 5 voltios. En ese momento la locomotora arranca y continúa moviéndose con la velocidad correspondiente a 5 voltios que es la tensión eficaz de la corriente plana en ese momento. Supongamos ahora que hacemos lo mismo utilizando una corriente cuyos picos alcanzan un valor doble que la tensión eficaz. De nuevo, cuando lleguemos al punto en que los picos de la tensión alcanzan los 5 voltios la locomotora arrancará, pero a continuación seguirá moviéndose a la velocidad correspondiente a la tensión eficaz que ahora es la mitad, o sea 2,5 voltios. Así que la locomotora arrancará a una velocidad mucho menor que en el caso anterior.
Podría pensarse que en el primer caso, una vez que la locomotora ha arrancado a cinco voltios, podríamos disminuir la tensión eficaz para hacer que la locomotora baje de velocidad. Sin embargo al bajar la velocidad por debajo del límite que la hace arrancar, el motor entra en una zona inestable que le lleva a detenerse. Por eso mismo, los picos altos de la corriente se mantienen indefinidamente mientras la locomotora está en marcha para que no se detenga.
Lo que deseamos todos es tener un control fino de nuestras locomotoras, es decir poder manejarlas a velocidades muy bajas, así que lo que nos interesa es conseguir el arranque cuanto más lento mejor. Acabamos de deducir que entonces lo que nos interesa es que la relación entre la tensión de pico y la tensión eficaz de la corriente tenga el mayor valor posible.
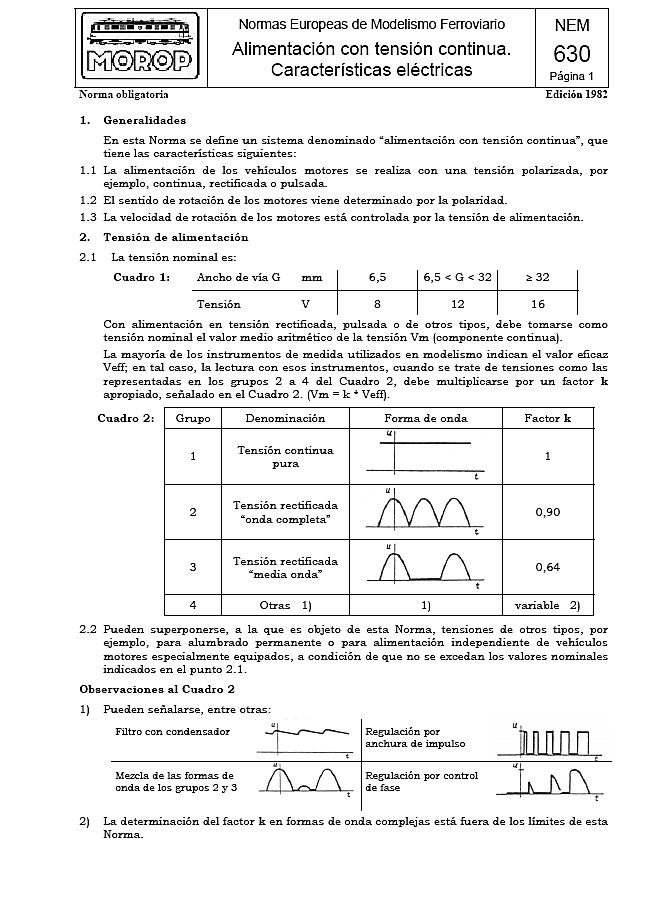
Hasta ahora hemos visto dos posibilidades: La corriente continua plana y la corriente rectificada de onda completa (la de media onda la desechamos por el motivo que se expuso) En la primera, el factor es 1 y en la rectificada de onda completa es 1,41 Así que es mejor la corriente rectificada de doble onda que la continua plana.

Alguno seguramente se sorprenderá de esta conclusión. De hecho muchos aficionados creen que para alimentar un tren de corriente continua se necesita corriente continua pura, y buscan o construyen fuentes de alimentación capaces de proporcionar una corriente continua cuidadosamente filtrada y estabilizada. Esto es un error, como acabamos de comprobar. De hecho se ven en foros y blogs algunos circuitos artesanales basados en un regulador de tensión del tipo LM317 o similares. Estos reguladores son excelentes para obtener una corriente continua de tensión variable, pero obtienen exactamente eso: una tensión variable plana, por lo que el comportamiento de los motores, en cuanto al arranque, no es el mejor. En la imagen precedente vemos uno de esos populares circuitos que lleva un rectificador de onda completa, un filtro constituído por el condensador de 1000 uF y el regulador constituido por un circuito LM317. Como se puede comprobar se obtiene una corriente continua, regulable en tensión, y casi perfectamente plana. O sea, para decirlo corto: lo peor que podemos desear para alimentar un tren.
Bueno, ¿y no podíamos mejorarlo? recordando lo decíamos acerca de la corriente de media onda, la relación entre el valor de pico y el valor eficaz es de 16,95 / 6 = 2,82 ¡Caramba, que buen valor! es el doble que la rectificada de onda completa. Es una lástima que como vimos su valor eficaz se quede tan bajo. Alguien podría pensar que si aumentamos la tensión hasta que el valor eficaz sea de 12 voltios con esa misma forma de onda, tendríamos una buena opción, pero no hay que olvidar que si hacemos esto, los picos de tensión serían del orden de 34 voltios, lo cual podría resultar peligroso para el motor.
Afortunadamente hay otra opción, que es realmente curiosa: Se trata de mezclar dos tensiones, una de media onda y otra de onda completa, y conseguir que al comenzar a aumentar la tensión, aumente primero la de media onda y después empiece a aumentar la de onda completa. En el vídeo siguiente podemos ver el circuito que produce ese tipo de corriente y en el osciloscopio vemos como va variando la forma de onda según movemos el control.
El circuito como se ve es realmente sencillo, aunque entre los fabricantes que lo hacen hay algunas variaciones, pero la esencia es la misma. En el esquema del vídeo el potenciómetro RV2 sirve para ajustar la mezcla de las dos señales y el RV1 es el potenciómetro con el que controlamos la velocidad de los trenes.
Lo interesante del tema, es que como se aprecia en el vídeo perfectamente, al empezar a aumentar la tensión la forma de onda es casi exactamente igual a la onda rectificada de media onda, y que según vamos aumentando la tensión de salida, la forma de onda se va convirtiendo en una rectificada de onda completa. Esto quiere decir que a velocidades bajas, la relación entre la tensión de pico y la eficaz será del orden de la de media onda, es decir, cercano a 2,82 mientras que cuando la tensión alcanza el máximo el valor habrá bajado a 1,41. O sea que si como antes decíamos el motor que tenemos alcanza con una tensión de pico de 5 voltios el punto de arranque, al empezar a moverse la locomotora lo hará con una velocidad correspondiente a 5 / 2,82 = 1,77 Voltios. Esto es excelente, porque la locomotora se moverá muy despacio, pero no se para, porque los picos de 5 voltios la mantienen en marcha. Compárense estos 1,77 Voltios con los 5 Voltios de la corriente continua pura.
Casi todos los fabricantes de trenes hacen controladores analógicos "de gama alta" basados en este sistema más o menos perfeccionado. El problema es que muchas veces no está claro si lo que nos ofrecen es un controlador de onda rectificada completa o este segundo tipo, mucho mejor, que yo llamo de onda rectificada compuesta. Como se ha podido ver, llegar a comprender todo esto es bastante complicado y por lo tanto es muy difícil que los fabricantes hagan intentos por aclararlo. De hecho la mayoría de los fabricantes huyen de profundidades técnicas porque suponen que éstas hacen huir a sus clientes. Habría que romper una lanza en favor de la Empresa TITAN que al menos menciona el tema. Este párrafo está tomado de las especificaciones de su modelo 825:
- La tensión continua se puede variar con el mando giratorio. La variación se produce casi sin escalonamientos, puesto que se realiza mediante unas escobillas que están en contacto directo con el arrollamiento del transformador. Cuando el mando giratorio está en posición central no hay tensión, girándolo a la derecha o a la izquierda se determina el sentido de marcha o de giro de los vehículos hacia delante o hacia atrás respectivamente. El aparato dispone de un sistema arrancador por semionda para proporcionar un mayor par de arranque a los motores de aprox. 0,2 V DCeff. Este ligero aumento de la tensión no puede dañar al motor con inducido en forma de campana.
Supongo que para la mayoría de sus compradores lo del sistema arrancador por semionda les sonará a chino, pero espero que los lectores que hayan tenido la paciencia de llegar a este punto lo tengan claro.
Por lo que parece Fleishmann * los identifica con la sigla "MSF" pero no he sido capaz de localizar ninguna explicación sobre el significado de la misma.
Y aquí quiero introducir un comentario que se refiere a la polémica que se suscitó en el hilo de Plataforma-N, al hablar de estos temas: Como digo no hay una nomenclatura clara para distinguir entre unos tipos y otros, entre otras cosas porque la mayoría de la gente no tiene claras estas diferencias. Pero en algunos casos se ha llamado a los aparatos que generan esta onda compuesta transformadores de corriente pulsada o de corriente pulsante. Yo no estoy de acuerdo con esta nomenclatura, en principio porque la expresión "corriente pulsante" no corresponde a ninguna definición técnica (como si ocurre con las expresiones rectificada de media onda o rectificada de onda completa), así que resulta ambigua. Podríamos decir que con corriente "pulsante" queremos decir una corriente cuya tensión varía periódicamente en el tiempo, pero entonces, excepto en el caso de la continua plana todas los tipos que aquí se han visto son pulsantes y de hecho también lo son muchos más tipos como las de diente de sierra, cuadradas, etc, así que pretender utilizar la expresión pulsante para distinguir la corriente compuesta de las de media onda o de onda completa, es absurdo porque todas ellas son pulsantes.
Debo decir, que en ningún catálogo de fabricantes he visto que se utilizase la epresión "corriente pulsante" para referirse a este tipo de aparatos, pero si lo he visto usar en algunos foros y también por vendedores particulares en E-Bay y sitios similares.
No tendría mayor importancia si no fuese porque la exprexión "corriente pulsante", que insisto, no es técnica, lleva a muchos a pensar que se está hablando de corriente PWM. La expresión PWM corresponde a "Pulse Width Modulation" o sea "modulación por anchura de pulso" y que es la última forma de alimentar los motores de nuestros trenes, y que abordaremos a continuación.
La palabra "pulse" en inglés y que en español llamamos también "pulso" tiene una significación muy precisa en electrónica puesto que se refiere a una forma de onda cuyo valor sube y baja de forma prácticamente instantánea entre dos valores. Por lo tanto su representación gráfica está formada por segmentos verticales unidos por otros generalmente horizontales. En este sentido, ninguna de las formas de onda que hemos visto hasta ahora está formada por pulsos, ya que todas las variaciones se hacen siguiendo curvas de tipo senoidal, de manera que desde este punto de vista a ninguna se le puede llamar pulsada o pulsante,
Insisto en que no tendría demasiada importancia, si o fuese porque el utilizar la expresión corriente pulsante en un anuncio de venta por ejemplo, puede hacer creer al comprador que se está vendiendo un control PWM abusando de la semejanza entre la expresión "pulsante" y la palabra "pulse" en la expresión Pulse Width Modulation.
Yo les llamo a estos controladores de corriente compuesta, que me parece lo más apropiado dada la forma de onda de la corriente que producen ( y la forma de generarla) , y vuelvo a insistir que son, con mucho, la mejor solución de todas las vistas hasta ahora. Casi todas las marcas fabrican controladores de este tipo.
Vamos ahora a ver el caso de la corriente PWM. Los que sigan este blog sabrán que me he dedicado a estudiar las posibilidades de este tipo de corriente para el control de los trenes, y he diseñado y construido unos cuantos modelos de controladores PWM, tanto para mi, como para los que me los han pedido.
Haciendo lo mismo que en los casos anteriores, tenemos a continuación un video donde podemos ver simultáneamente el circuito que genera este tipo de corriente, y la forma de onda en la pantalla del osciloscopio virtual. También en este caso hay un mando, un potenciómetro, que actuando sobre él, permite apreciar como varía la forma de onda según movemos el control de velocidad.
En este caso el circuito se basa en un circuito integrado, concretamente un NE555, y apenas unos pocos componentes más.
Como vemos en el vídeo, la forma de onda está formada por pulsos (ahora si, pulsos, porque los flancos son verticales) y con el control lo que hacemos es variar la anchura de estos pulsos, de forma que con el mando al mínimo, los pulsos son tan estrechos que prácticamente desaparecen, y con el mando al máximo se hacen tan anchos que practicamente se juntan con los contiguos.

Observese que para Duty = 0% el valor de la tensión eficaz es cero, y para Duty=100% el valor de la tensión eficaz es Vmax en este caso 12 Voltios. Por supuesto con valores intermedios, como por ejemplo con duty = 20% la tensión eficaz es el 20% de 12 o sea 2,4 Voltios. Etc.
Pero, si aplicamos este caso al motor que considerábamos antes, que empieza a rodar cuando la tensión de pico sobrepasa los cinco voltios, resulta que en este caso, el motor arranca siempre, porque la corriente de pico es siempre de 12 Voltios. Como antes dijimos, una vez que el motor ha arrancado, empieza a moverse a la velocidad que corresponde a la tensión eficaz, que en este caso puede ser bajísima. Por ejemplo con un duty del 5% la tensión eficaz sería de solo 0,6 Voltios. Si el motor es capaz de girar con sólo 0,6 voltios, es decir si con eso vence el rozamiento dinámico, la locomotora se moverá a una velocidad superlenta. Vamos a suponer que bajamos incluso el duty al 1%. Esto daría un valor eficaz de 0,12 Voltios Si con esa tensión el motor no puede vencer los rozamientos dinámicos la locomotora no arranca, pero sigue intentando hacerlo con cada pico de 12 voltios. Cuando esto sucede la locomotora no llega a moverse pero emite un ronroneo que indica que está intentando arrancar con cada pulso.
La experiencia indica que con valores de tensión eficaz bajísimos (ayudado por los pulsos) el motor se mantiene en marcha. Naturalmente el comportamiento no es igual en todas las locomotoras, pero en la gran mayoría se consigue un control super-preciso y velocidades lentísimas.
El valor que calculábamos antes como la relación entre la tensión de pico y la eficaz, y que nos daba un valor de 1 para la corriente plana, un valor de 1,41 para la rectificada de doble onda, un valor variable entre 2,82 y 1,41 para la corriente compuesta, en este caso, es también variable pero puede alcanzar valores de más de 10 fácilmente. Sin embargo con el regulador al máximo, o sea con Duty = 100% el valor de los picos no sobrepasa el valor nominal de la corriente. De hecho en este caso la corriente PWM se ha convertido prácticamente en una corriente continua plana por lo que su valor eficaz es el mismo que la tensión de pico.
Como se deduce de todo lo dicho, resulta que paradójicamente, lo peor que podemos emplear para alimentar un motor de corriente continua es precisamente una corriente continua, mientras que lo mejor, con diferencia, es una corriente PWM. Hay un hecho que evidencia la certeza de esta afirmación, y es que el motor de TODAS las locomotoras digitales funcionan con corriente PWM. No es que la corriente digital sea una corriente PWM, que no lo es, sino que en base a las ordenes que recibe, el decodificador instalado en las locomotoras digitales, genera una corriente PWM de tensión fija y duty variable para alimentar el motor. Con ello se consigue que las locomotoras digitales presentan esa marcha suave y perfectamente regulada que ha hecho tan populares a los sistemas digitales.
Curiosamente, las grandes marcas no han aplicado la tracción PWM a las locomotoras analógicas. Supongo que el motivo es que desde que se lanzaron los sistemas digitales, las marcas no han hecho el más mínimo esfuerzo por actualizar los sistemas analógicos, supongo que para forzar a sus clientes al campo digital, que es lo que les interesa. Es una lástima, porque desde que el analógico fué abandonado a su suerte, la electrónica ha progresado y se ha abaratado extraordinariamente, de modo que hoy es posible construir controladores PWM para trenes analógicos a precios perfectamente asumibles.
Una advertencia final: Los esquemas electrónicos que se ven en las imágenes de este artículo y del anterior, no son circuitos operativos que puedan construirse directamente. Su objetivo es simplemente generar las señales que se visualizan en la pantalla del osciloscopio como ilustración de los temas tratados. Para construir un sistema real de control de trenes hay que tener en cuenta una serie de factores que aquí se han obviado para mayor sencillez. Entre estos sistemas estarán las protecciones frente a sobrecargas y cortocircuitos, las etapas de potencia que pueden ser necesarias para generar la potencia requerida por los trenes y los sistemas para invertir el sentido de la marcha.
Espero que estos dos artículos hayan permitido a algunos lectores conocer un poco más acerca de las posibilidades que nos ofrecen los distintos sistemas de tracción para trenes analógicos.
Estaré encantado de recibir y responder a cualquier cuestión o comentario.
---------------------------------------------------------------
* He localizado el significado de la sigla "MSF" con que Fleishmann identifica sus transformadores de corriente compuesta. La referencia dice esto:
„MSF“ - Multi Sensible Feinsteuerung - bietet im gekennzeichneten „MSF“-Bereich langsamste Rangierfahrten durch kontinuierlichen Übergang von Halbwellen- über Mischwellen zur Vollwellen-Gleichrichtung.
Que puede traducirse más o menos así:
MSF - Control Fino Multisensible - Ofrece, en el área marcada "MSF", un arranque más lento gracias a una transición continua desde un perfil de media onda hasta una corriente rectificada de onda completa
O sea, que coincide plenamente con lo dicho en el texto.
___________________________________________________________
Como me han hecho alguna consulta sobre el tema aclaro lo siguiente:
Aquí se ha dicho que para mover los trenes es mejor una corriente rectificada o una corriente compuesta, y lo mejor una corriente PWM. Pero eso se refiere a la corriente que llega a las vías.
Normalmente los controladores PWM como los que se han propuesto en este blog, se alimentan con corriente continua, pero esa es la alimentación del propio circuito PWM y no lo que va a la vía. Por lo tanto para alimentar estos controladores PWM, lo mismo que para alimentar cualquier circuito electrónico que requiera corriente continua, lo adecuado es una corriente continua plana, cuanto más estable mejor. Para eso son ideales las fuentes de alimentación de tipo conmutado.
_________________________________________________________________
Pulsando en la imagen de la izquierda, se podrá ver un facimil de esa norma NEM
------------------------------------------------------------------------------------------------------------
Editado 01/04/2015
En esta fecha se ha publicado en este blog, un artículo comparando los diversos tipos de controladores PWM que podemos encontrar. Este es el enlace:
Comparativa PWM